Mein Roboter
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
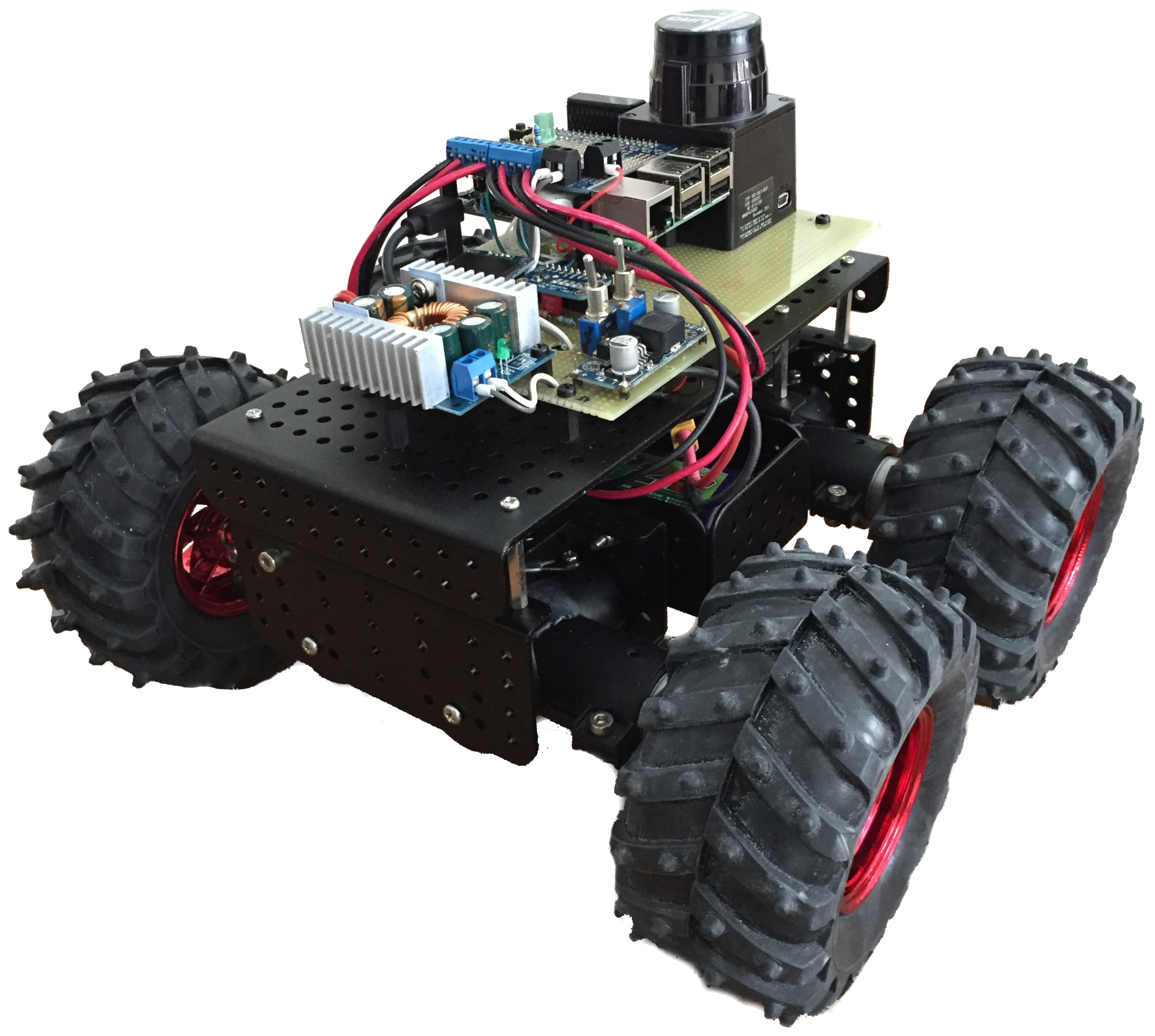
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
Für die, die sich fragen, warum die Kinect denn zusätzlich zum bereits vorhandenen Laserscanner nötig ist, hier ein paar Erläuterungen. Ein Vorteil des Laserscanners ist seine hohe Reichweite. Das kommt sicher im Umfeld einer Wohnung oder eines Hauses sicher kaum zum Tragen, ist aber nicht zu verachten. Vor allem aber ist der Laserscanner, dessen normales Einsatzgebiet Sicherheitsbereiche in der Fabrikation mit extrem hohen Anforderungen ist, sehr zuverlässig. Eine optische Erkennung, die auf Software basiert kann derzeit nur ungenauer sein, als die bereits seit langer Zeit im Einsatz befindliche und erprobte Hardware.
Der wesentliche Nachteil des Laserscanners gegenüber der Microsoft Kinect Kamera ist aber, dass er nur zweidimensional scannt. Die Laserstrahlen breiten sich wie ein Fächer nur auf einer Ebene aus. Um das deutlich zu machen wurde im Folgenden ein Päckchen vor dem Roboter als "Hindernis" platziert – einmal hochkant, so dass es in den Scanbereich des Laserscanners hineinragt und einmal flach auf dem Boden liegend, so dass die Laserstrahlen über das Päckchen hinweg gehen. Und so sieht das Ganze dann aus:


Deutlich zu erkennen, dass im linken Screenshot das Päckchen von der Software als Hindernis erkannt wird (hellroter Bereich="Hindernis", grüner Bereich = "frei") während auf dem rechten Bild das Hindernis nur von der Kinect dargestellt wird (weiße grobe Umrisse links unten in dem schwarz-weiß-Bild), für den Laserscanner aber alles "frei" scheint (grün).
Anmerkung: Die Software wertet die Kinect-Daten noch nicht aktiv aus, sondern zeigt sie nur als Bild an.