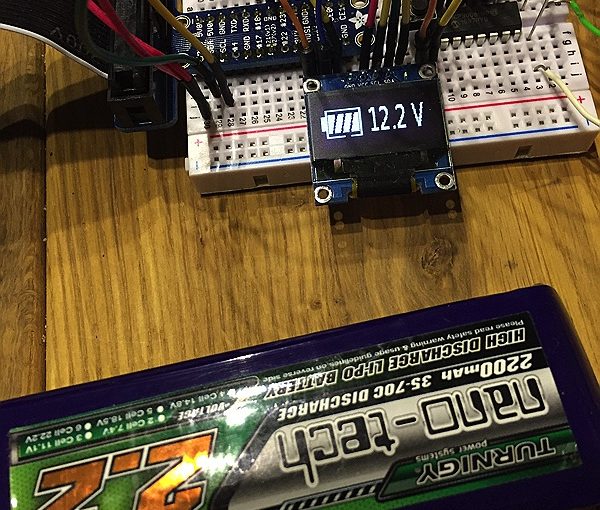
Bisher hatte ich für meinen Roboter die Akku-Überwachung mittels MCP3008 realisiert. Aber irgendwie funktionierte dieser auf einmal nicht mehr – und lässt sich wegen SPI nicht groß auf dem Raspberry Pi debuggen. Also habe ich mir eine schöne neue Lösung mit I2C gesucht. Außerdem wurde das OLED komplett neu angesteuert und die Spannung überwacht. Spannungsmessung mit AD-Wandler am Raspberry Pi – verbessert mit I2C weiterlesen
SSH-Zugriff auf Raspberry Pi nicht mehr möglich
Vielleicht hattet ihr das Problem auch schon mal oder es betrifft euch gerade. Ich konnte mich plötzlich nicht mehr per SSH mit dem Raspberry Pi verbinden – obwohl ich eigentlich nichts auf dem Pi verändert hatte. Eigentlich. SSH-Zugriff auf Raspberry Pi nicht mehr möglich weiterlesen
minibot Radencoder für den RP5/RP6 mit Aufkleber als Download
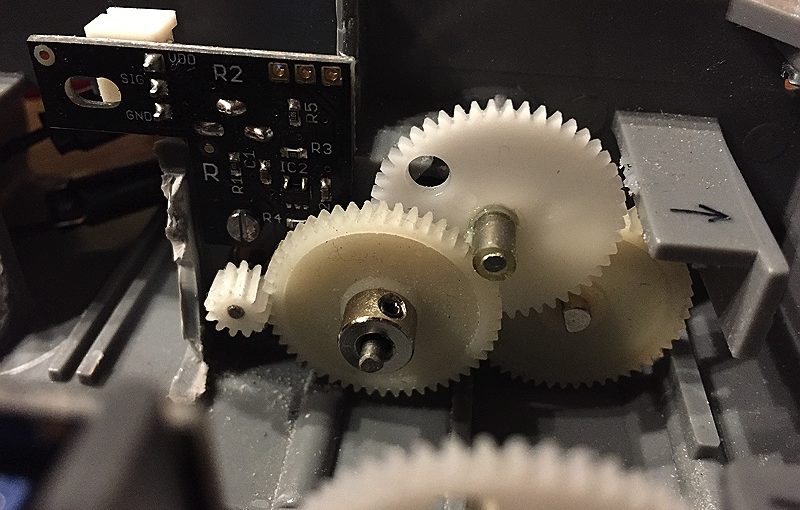
Odometrie
Wie weiß man, wie weit ein Roboter gefahren ist oder wo er sich befindet? Mit Odometrie! Um dieses für meinen minibot umzusetzen habe ich auf Radencoder zurückgegriffen, die bei jeder Bewegung der Räder Impulse an ein Lichtschranken auslösen. minibot Radencoder für den RP5/RP6 mit Aufkleber als Download weiterlesen
Der Adafruit BNO055 9-DOF Sensor IMU Breakout macht es einem nicht leicht – oder doch?
Um bei einem Roboter festzustellen, in welche Richtung er sich wie weit bewegt (hat), nutzt man Odometrie, also Wegmessung. Dieses hilft bei einer Orientierung im Raum, um zum Beispiel festzustellen, ob die Anweisung „fahre x Sekunden lang“ oder „fahre y weit“ auch wirklich funktioniert hat. Der Adafruit BNO055 9-DOF Sensor IMU Breakout macht es einem nicht leicht – oder doch? weiterlesen
ROS auf dem Raspberry Pi – Teil 3: Ansteuerung einer LED mit Python
Der Vollständigkeit erst mal eine Erklärung noch ohne ROS: Eine LED mit dem Raspberry Pi mit Python und RPi.GPIO Library ist denkbar einfach. ROS auf dem Raspberry Pi – Teil 3: Ansteuerung einer LED mit Python weiterlesen
Raspberry Pi Kamera-Fehler mmal ENOSPC beheben
Beim Testen meiner Raspberry Pi-Kamera mittels
raspistill -o test.jpg
kam seit einigen Tagen immer diese Fehlermeldung:
mmal: mmal_vc_component_enable: failed to enable component: ENOSPC mmal: camera component couldn't be enabled mmal: main: Failed to create camera component mmal: Failed to run camera app. Please check for firmware updates
Zuerst wurde natürlich eines der letzten Updates durch sudo apt-get update und sudo apt-get upgrade als Ursache vermutet. Aber Fehlanzeige. Auf Betriebsystem-Eben erschien alles einwandfrei. Für das Ubuntu ist die Kamera offenbar einsatzbereit. Raspberry Pi Kamera-Fehler mmal ENOSPC beheben weiterlesen
ROS auf dem Raspberry Pi – Teil 2: Ubuntu Mate anpassen
Nachdem ich im ersten Teil beschrieb, wie man ROS auf einem Raspberry Pi installiert, geht es nun um Anpassungen, die ich anschließend vornahm.
ROS auf dem Raspberry Pi – Teil 2: Ubuntu Mate anpassen weiterlesen
ROS auf dem Raspberry Pi – Teil 1: Installation und Test
Nun ist es also soweit: Nach viel Zeit mit dem Lesen von Büchern – ja, echten Büchern aus Papier – und dem Stöbern in sehr vielen Online-Tutorials und sonstigen Webseiten, habe ich endlich das Robot Operating System (ROS) auf einem Raspberry Pi 3 zum Laufen bekommen. Hier werde ich nun erklären, bzw. eine Art Anleitung schreiben, wie das funktioniert. Außerdem zeige ich meine ROS-Programme , die meinen selbstgebauten Roboter minibot steuern oder einfach nur eine LED ansteuern („ROS LED Blinky“).
ROS auf dem Raspberry Pi – Teil 1: Installation und Test weiterlesen
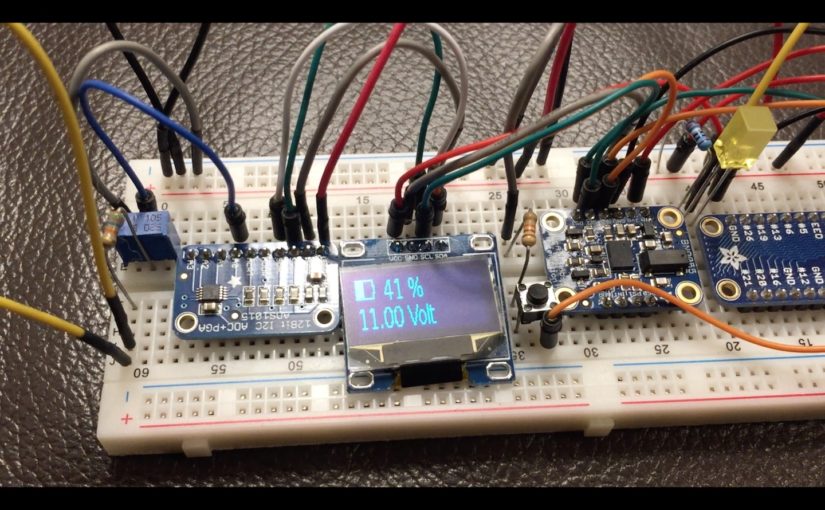
Spannungsmessung mit AD-Wandler am Raspberry Pi – Update
Damit das für den minibot angeschaffte OLED-Display auch einen vernünftigen Nutzen hat, soll es unter anderem für die Überwachung der Akku-Spannung genutzt werden. Dazu sind drei Schritte notwendig: Spannungsmessung mit AD-Wandler am Raspberry Pi – Update weiterlesen
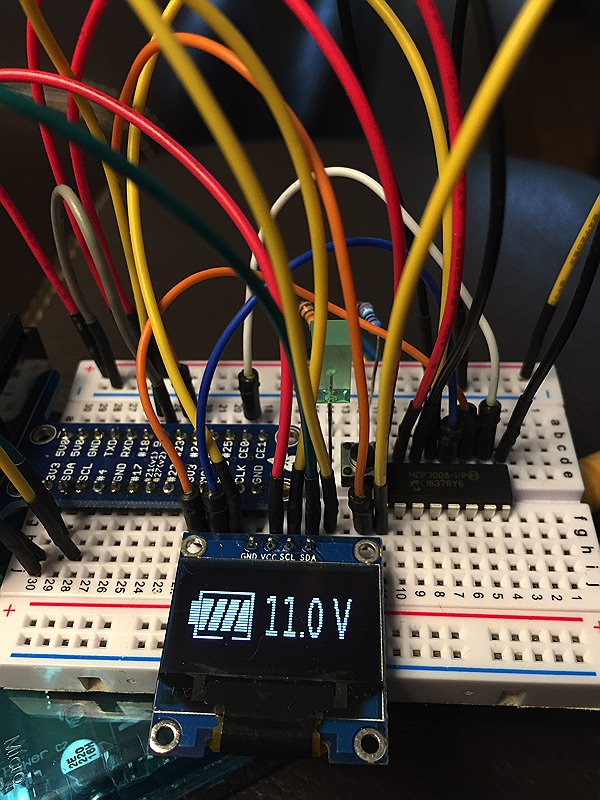
OLED? Grafik! Eine Batterie-Anzeige
Wenn das zuletzt gezeigte OLED-Display schon ein grafisches ist, dann sollte man das auch nutzen. Gesagt getan. Hier das Ergebnis: