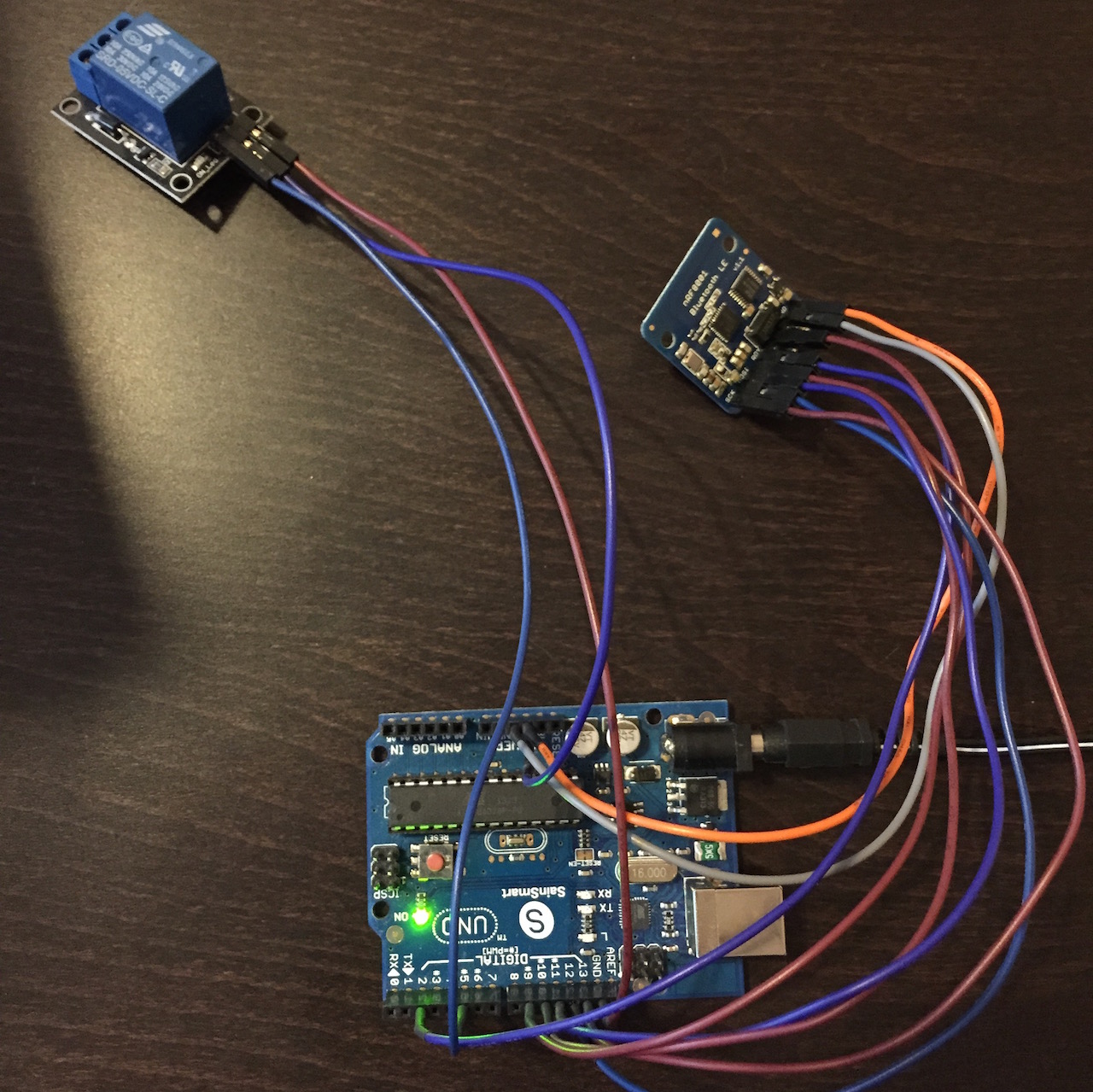
Immer schon einmal wollte ich per Apple Remote einen Arduino steuern. Und nun endlich habe ich mir die Zeit dazu genommen. Nach wirklich vielen Seiten im Netz habe ich mir die verschiedenen Teile zusammengesucht und ein Beispiel gebaut, was sehr simpel ist.
Es beruht auf der Bibliothek IRremote für den Arduino, die es bei GitHub frei zum Download gibt.
Alle Beispiele, die ich im Netz fand, konnten nicht mit den aktuellen Apple Remotes umgehen, aber letztendlich war es kein Problem diese mit den Beispielen im Code „auszulesen“ und in eigenen Code zu integrieren.
Meinen Sourcecode gibt es hier zum Download. Und das beste: Er funktioniert mit mit den beiden letzten, aktuellen Apple Remotes (aus Aluminium):

230V Relais schalten mit Arduino und Apple Remote weiterlesen