Odometrie
Wie weiß man, wie weit ein Roboter gefahren ist oder wo er sich befindet? Mit Odometrie! Um dieses für meinen minibot umzusetzen habe ich auf Radencoder zurückgegriffen, die bei jeder Bewegung der Räder Impulse an ein Lichtschranken auslösen.
Encoder
Diese Impulse können dann per Software gezählt und in gefahrene Entfernung umgerechnet werden – wie bei einem Fahrradtacho, der jede einzelne Radumdrehung zählt und umrechnet. Nur dass beim minibot sehr viel mehr Impulse gezählt pro Umdrehung werden; nämlich 625 pro Rad-Umdrehung.
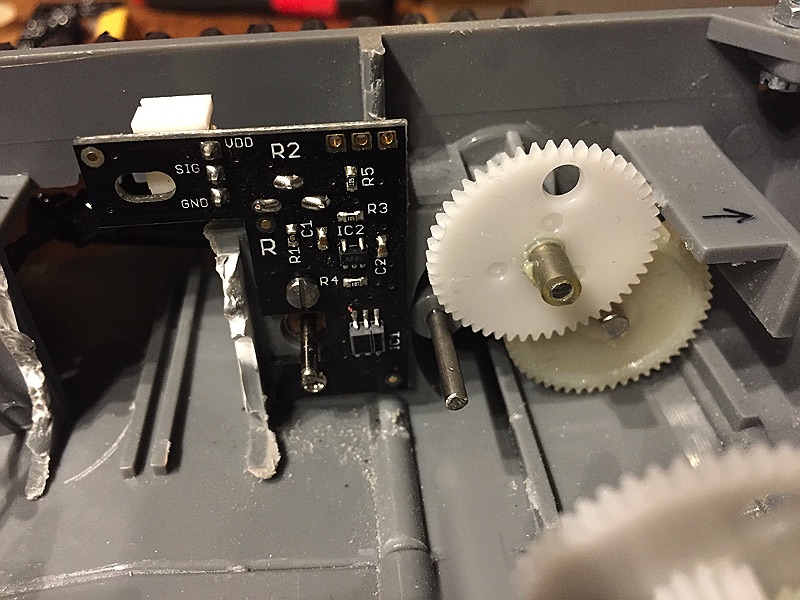
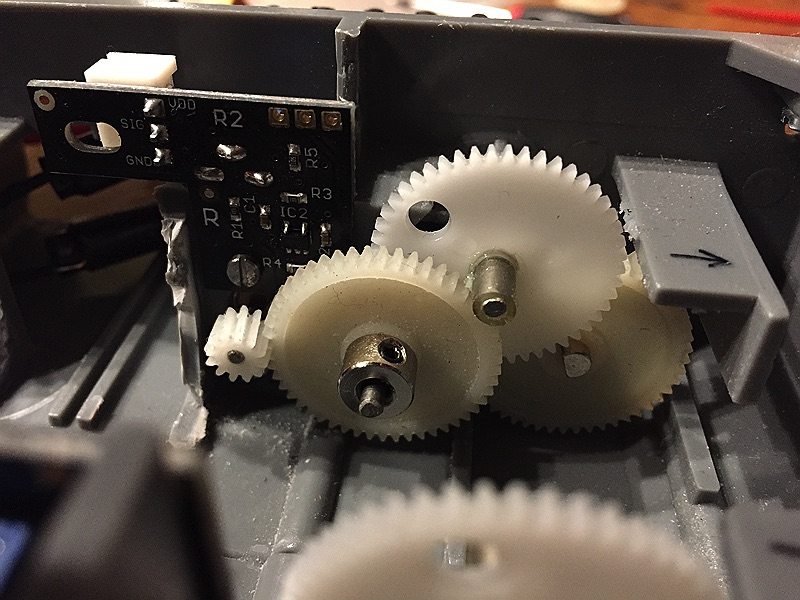
Die Funktionsweise
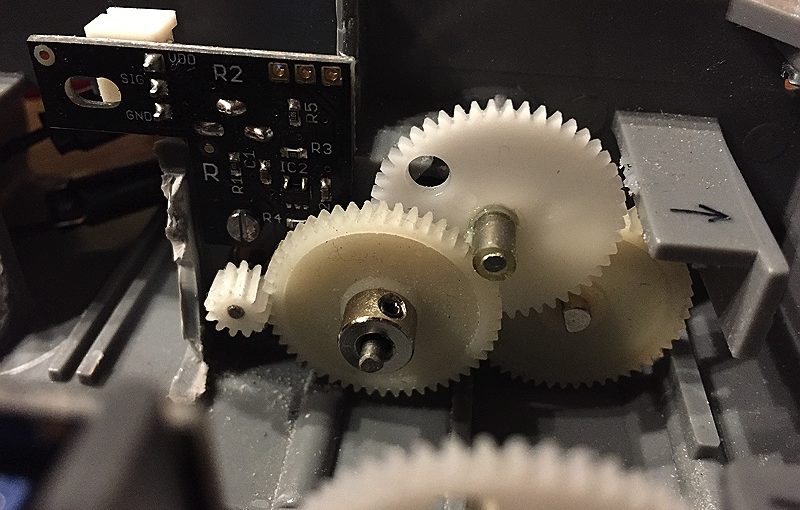
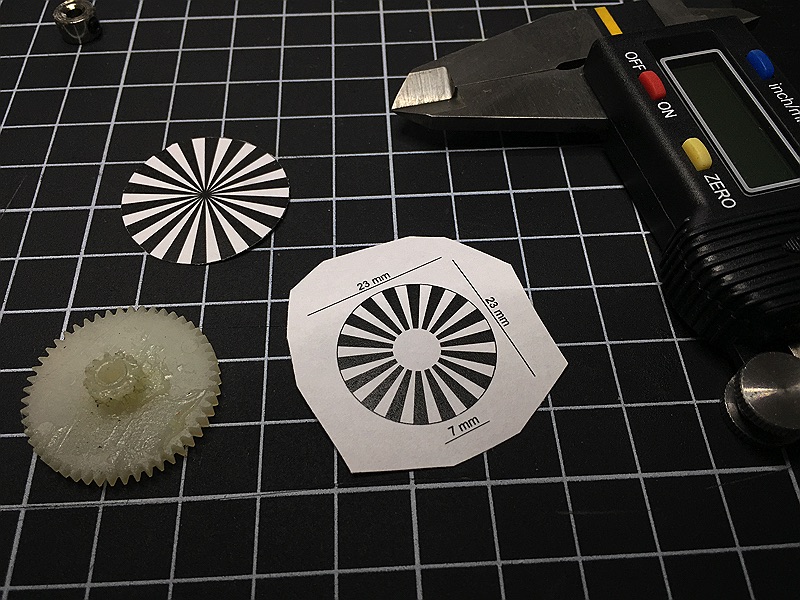
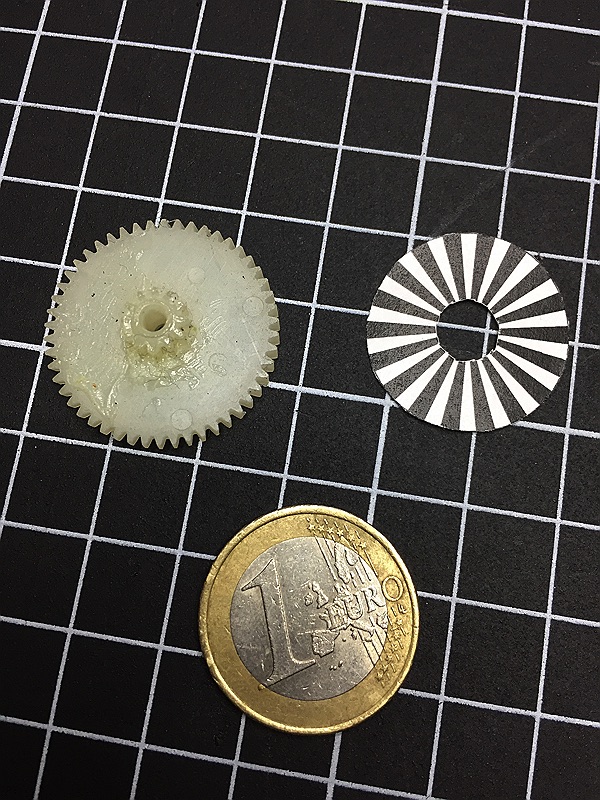
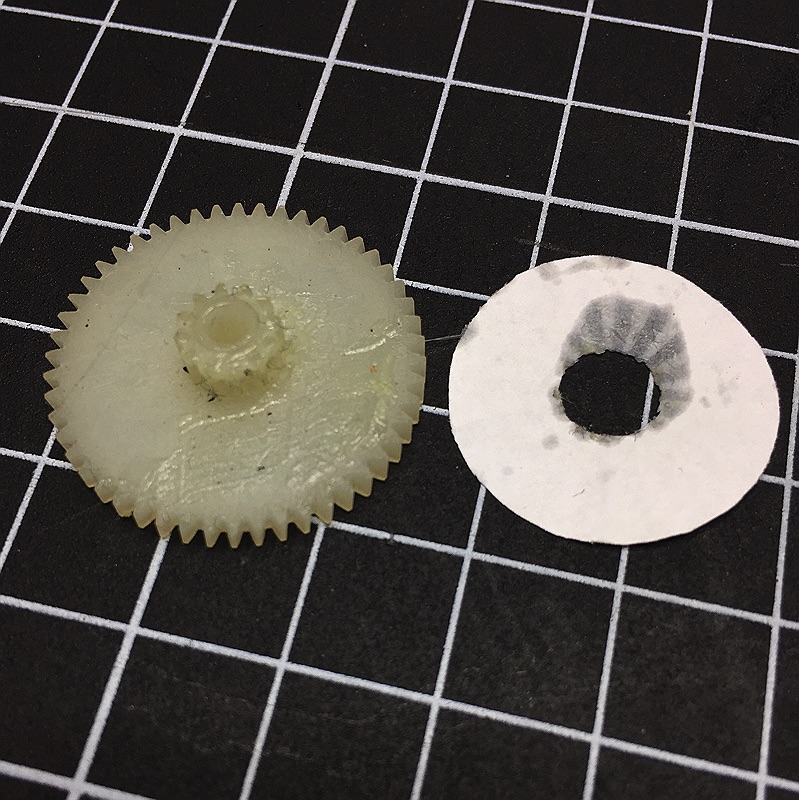
Das Verfahren ist recht simpel: auf jeweils eines der Zahnräder pro Seite eines Getriebes meines minibots (Arexx Roboterfahrgestell RP6) wird ein Aufkleber geklebt, welcher abwechselnd schwarz/weiß bedruckt ist. Auf dieses Muster schaut eine Infrarotlichtschranke, die den Wechsel der Farben erkennt und als High/Low-Impulse zurückgibt (5 Volt/0 Volt).
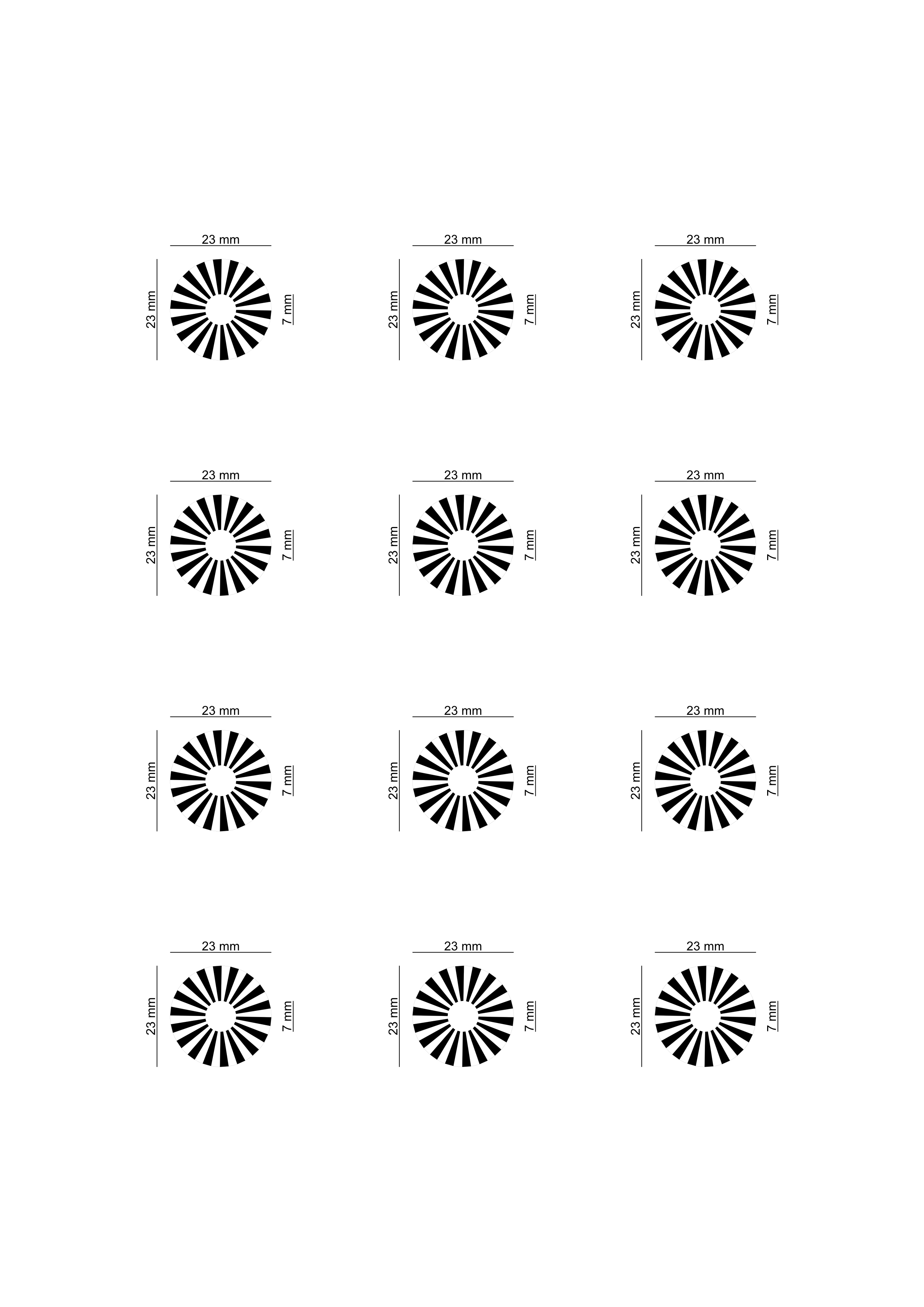
Die Zahnradaufkleber (Codierscheiben)
Wie es aussieht, gibt es die Aufkleber für die Zahnräder nicht einzeln zu bestellen, sondern nur mit einem ganzen Satz Ersatzzahnräder. Und bei den Encodern sind die Aufkleber auch nicht dabei.
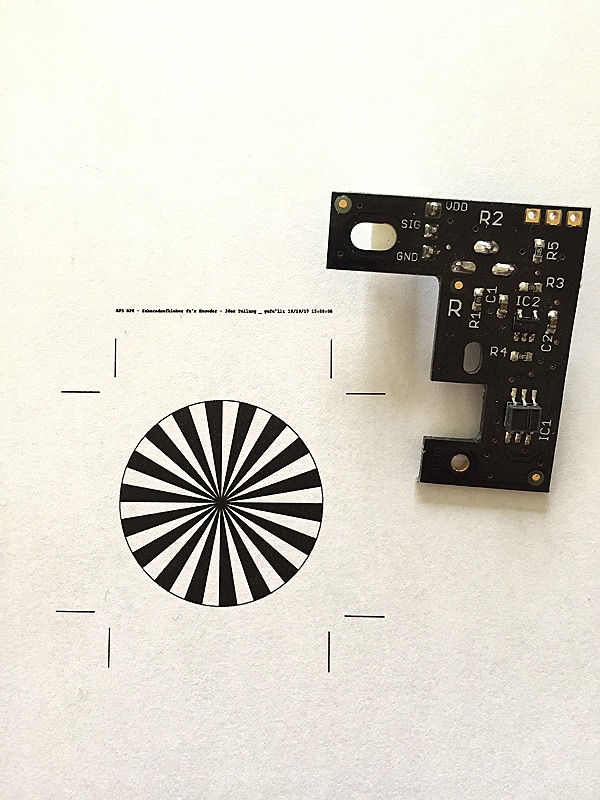
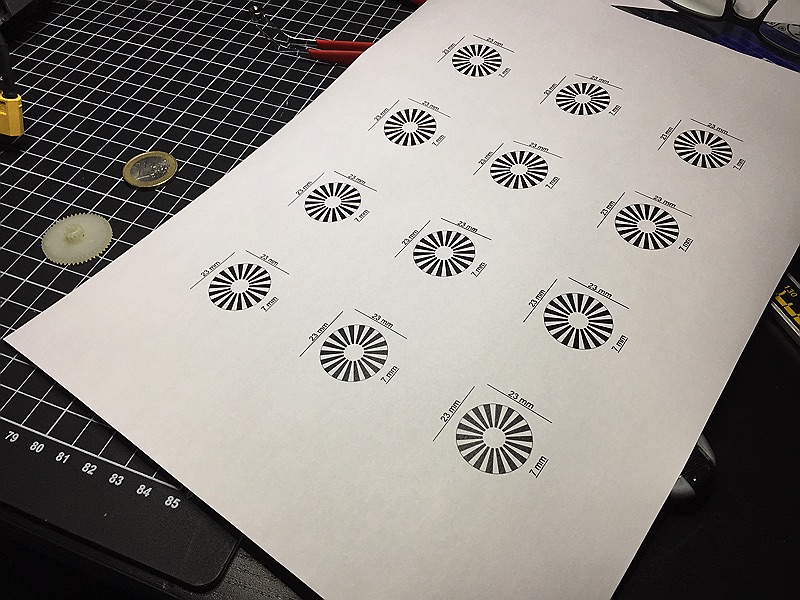
Die Aufkleber
Ich habe mich also daran gesetzt und mich endlich mal mit meinem Vektorzeichenprogramm Affinity Designer beschäftigt. Und damit ihr nicht jeder das Rad neu erfinden musst, gibt es die Dateien in verschiedenen Formaten hier am Ende des Beitrags zum Download.
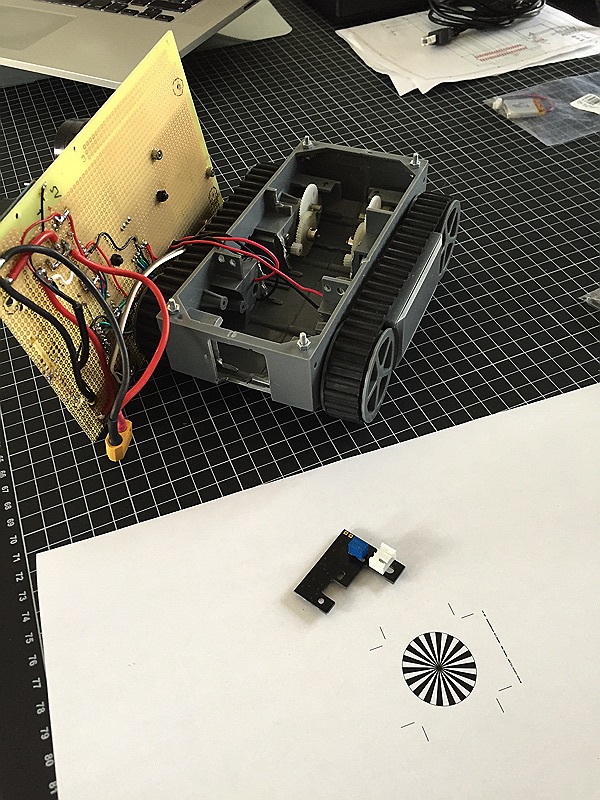
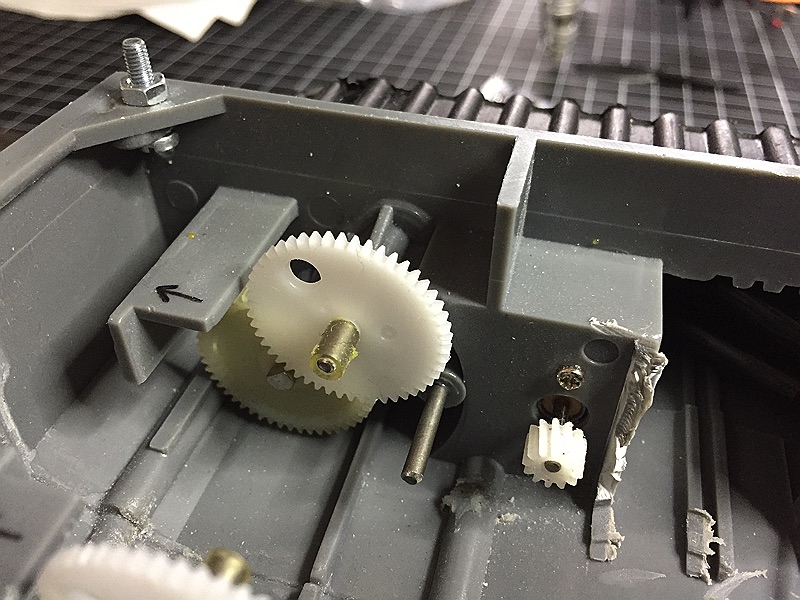
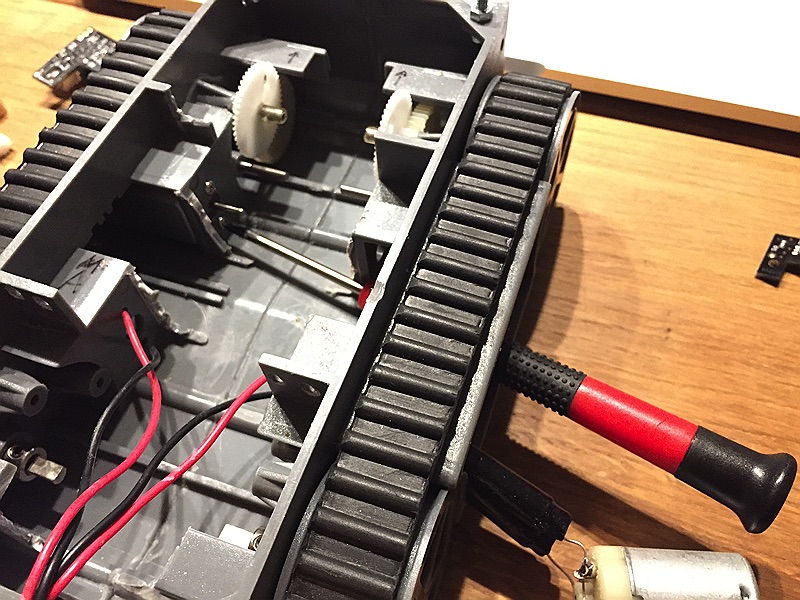
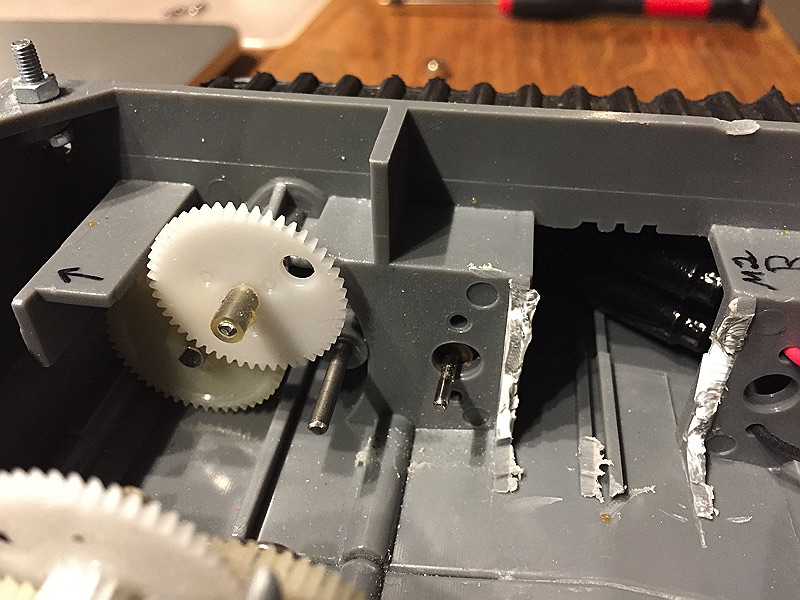
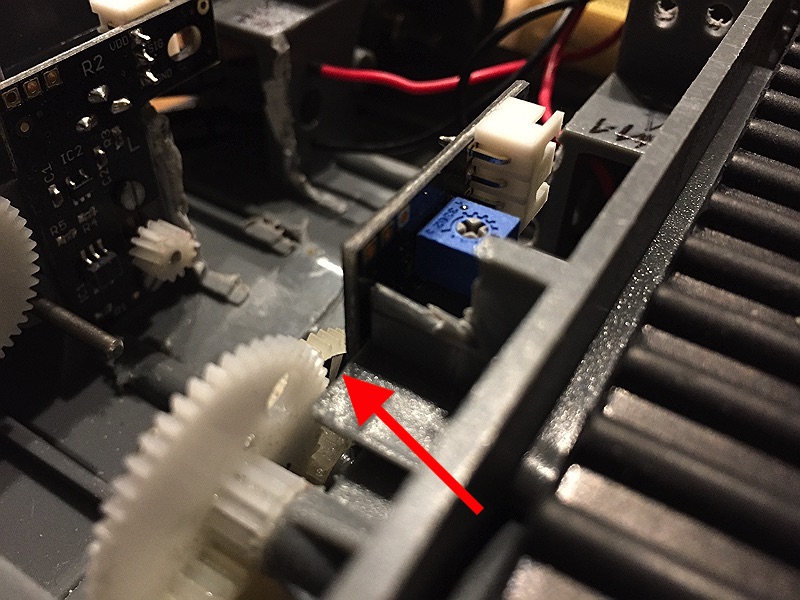
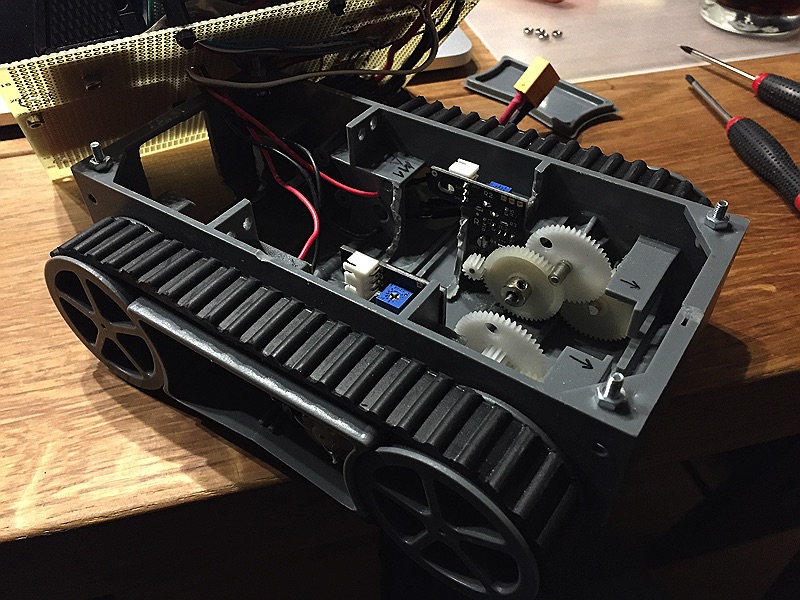
Die Montage
Und so habe ich die Encoder und die Aufkleber im minibot (RP6) montiert bzw. angebracht:
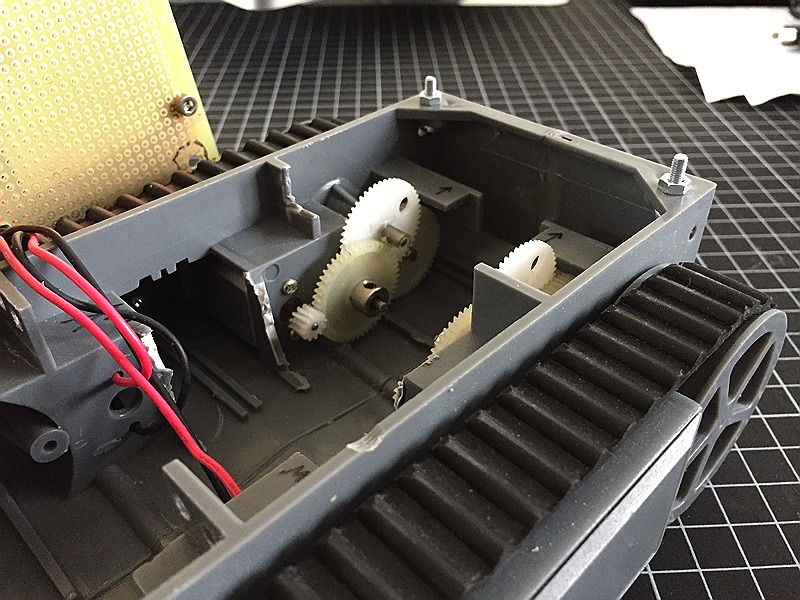
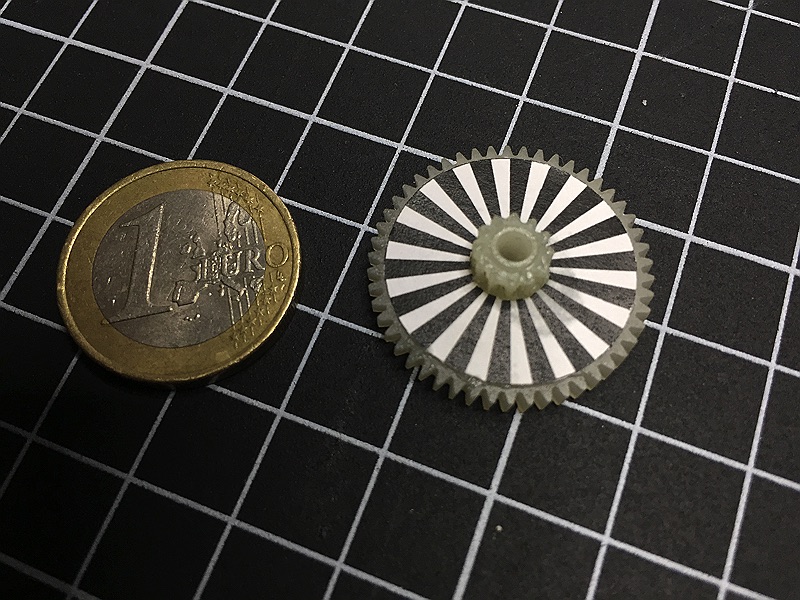
Wichtig: Die Zahnräder müssen vor dem Aufkleben auf der Klebefläche gut vom Fett befreit werden! Ansonsten hält das Papier nicht auf dem Zahnrad (ich habe normalen UHU-Alleskleber verwendet).
Alles klar? Viel Spaß beim Nachbauen! :)
Der Download
png-Format (einzeln)

png-Format (mehrere, DIN A4)
Und zum Schluss hier noch ein Download im .svg-Format (Vektorbasiert), einzeln oder mehrere im DIN A4-Format.