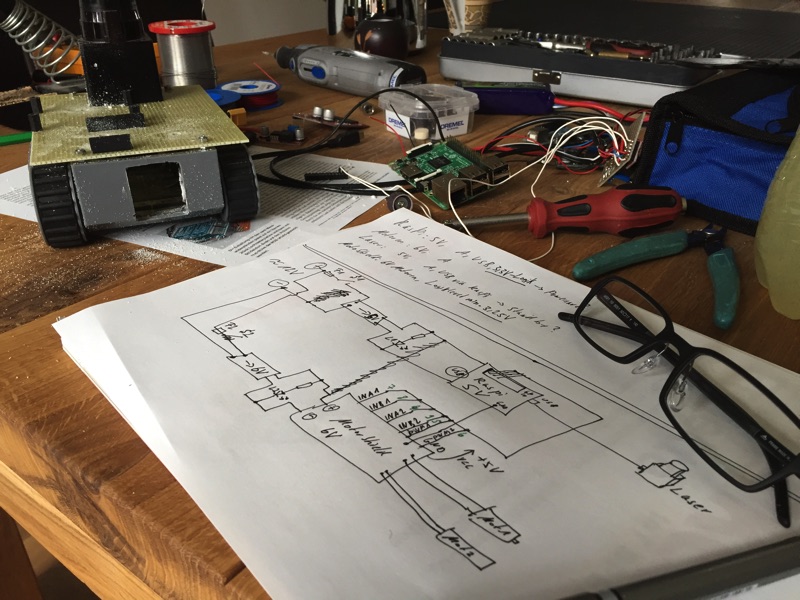
Mühsam ernährt sich das Eichhörnchen. Entsprechend langsam geht es mit dem minibot voran. Hier ein paar Fotos über den aktuellen Aufbau.
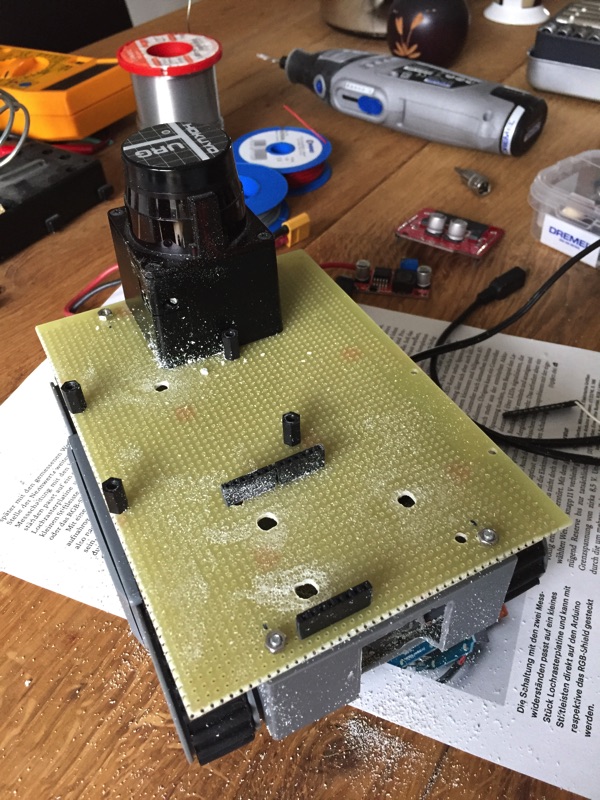
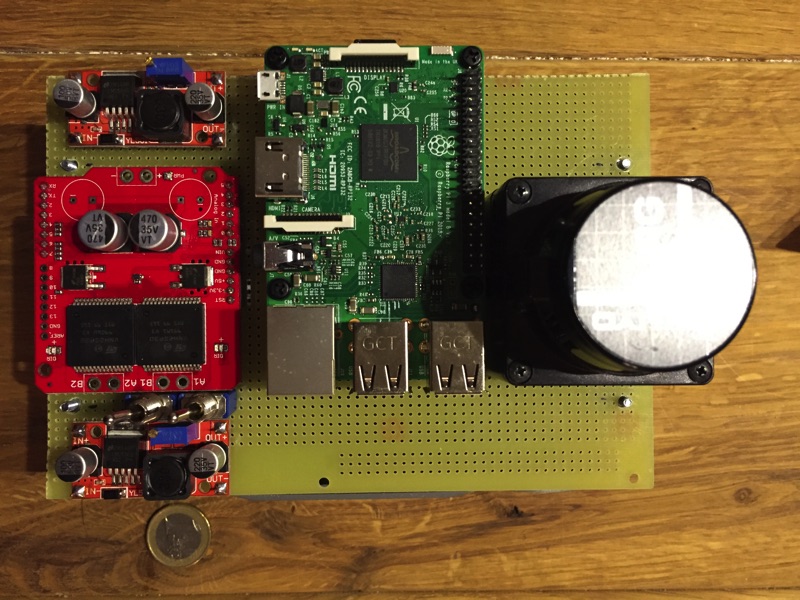
Mit dem Dremel (Neuanschaffung) wurden ein paar Löcher gebohrt, damit die Verkabelung auf der Unterseite der Platine erfolgen kann (z.B. die Stromversorgung per USB für den Raspberry Pi).
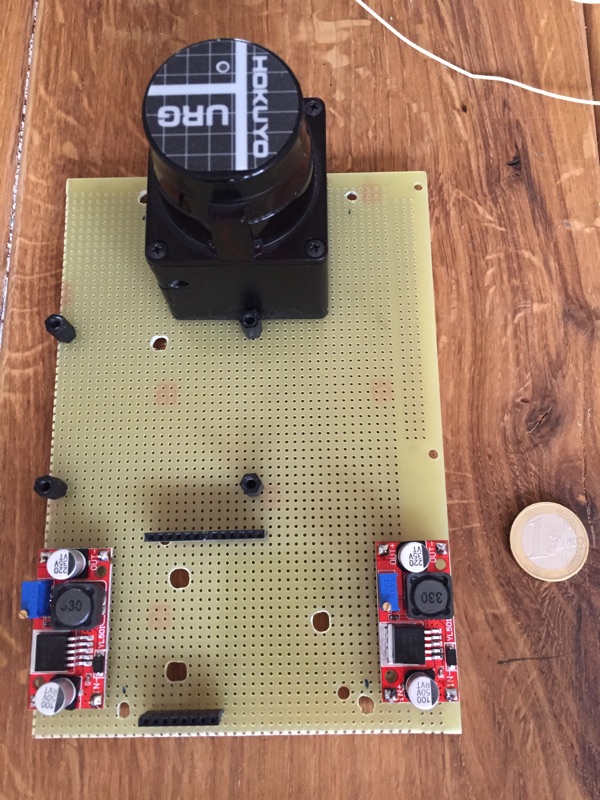
Zwei fertig aufgebaute „Netzteile“ mit Schaltreglern wurden hinzugefügt. Einmal 6 Volt für die Motoren und einmal 5 Volt für den Raspberry Pi.
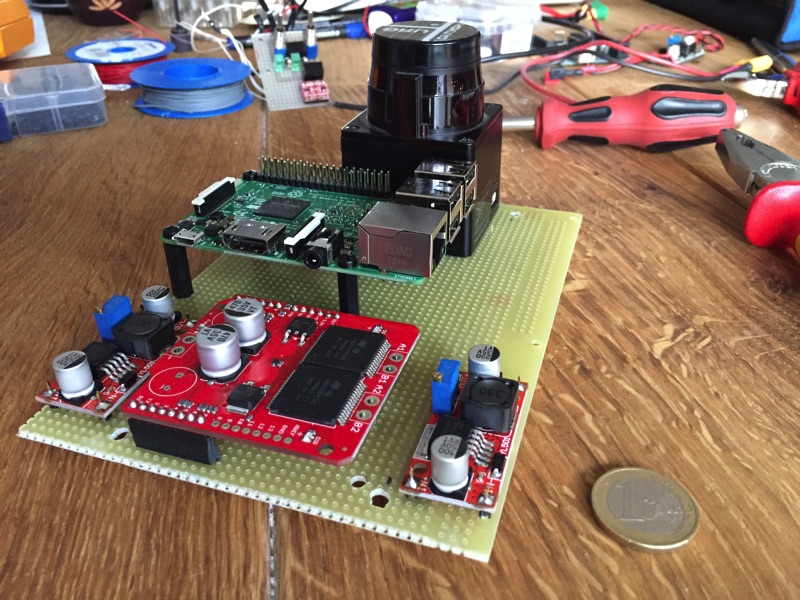
Damit man im Zweifelsfall später noch an den HDMI- und Klinkenstecker des RasPi kommt, wurde dieser mit Distanzbolzen erhöht montiert.
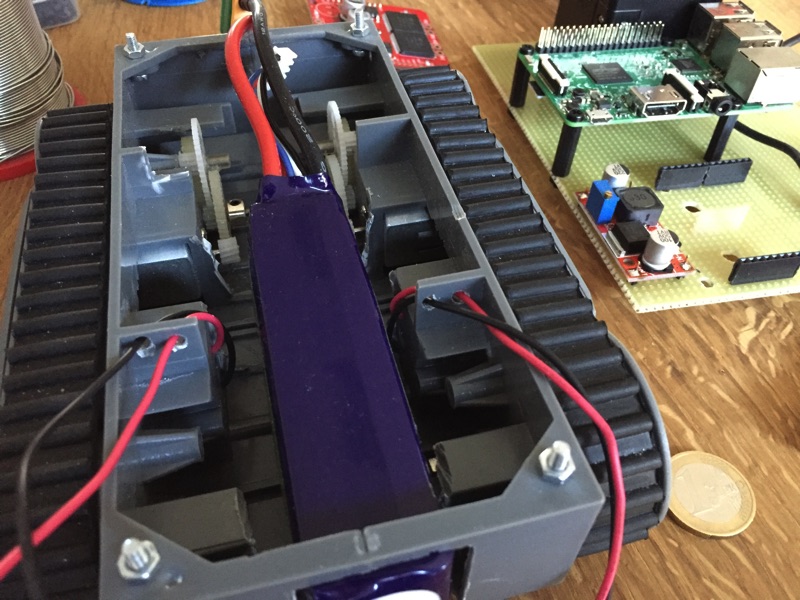
Damit beim „Akku-Einschub“ die Kabel der beiden Motoren nicht im Weg sind, wurden auch hier der Bohrer angesetzt.
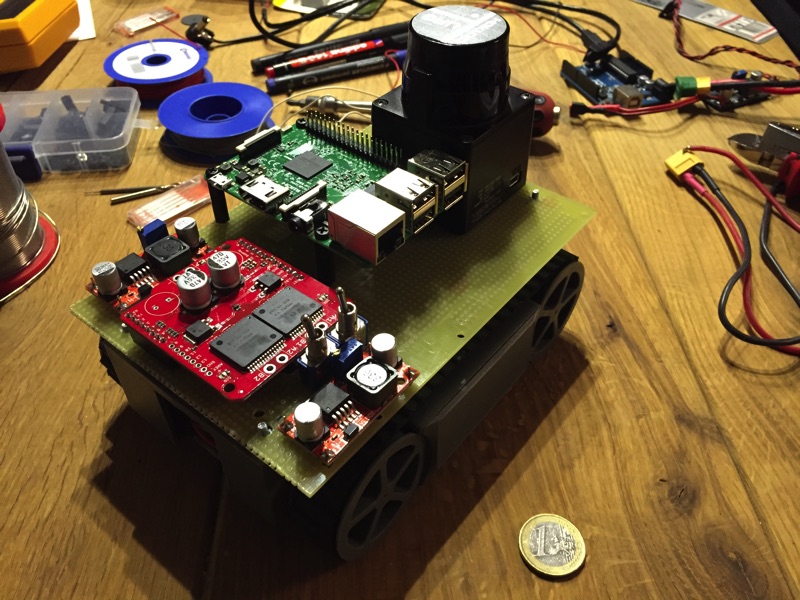
Und so sieht das Ganze von oben aus – ergänzt um zwei Kippschalter zum Ein- und Auschalten der beiden Spannungen später.
schick schick
wo hast du eigentlich den scanner her, der ist ja nicht gerade preiswert :)
Den besitze ich tatsächlich bereits recht lange; vor langer Zeit mal etwas leichtsinnig zugeschlagen…
Tatsächlich war er damals sogar bei einem Amazon-Händler am günstigsten (Spoiler: heute nicht mehr).