Bisher war die Deckplatte mit jeweils zwei Schrauben und den dreieckigen Haltern an den Aluprofilen befestigt. Hier besteht aber das Risiko, dass es mehr Möglichkeiten gibt, wo sich etwas lockern kann.
Darum wurden nun 5 mm-Gewinde in die senkrechten Profile gebohrt. Das Ganze lässt das ganze trotz weniger Schrauben wesentlicher stabiler erscheinen. Und hier die Bilder im Detail:


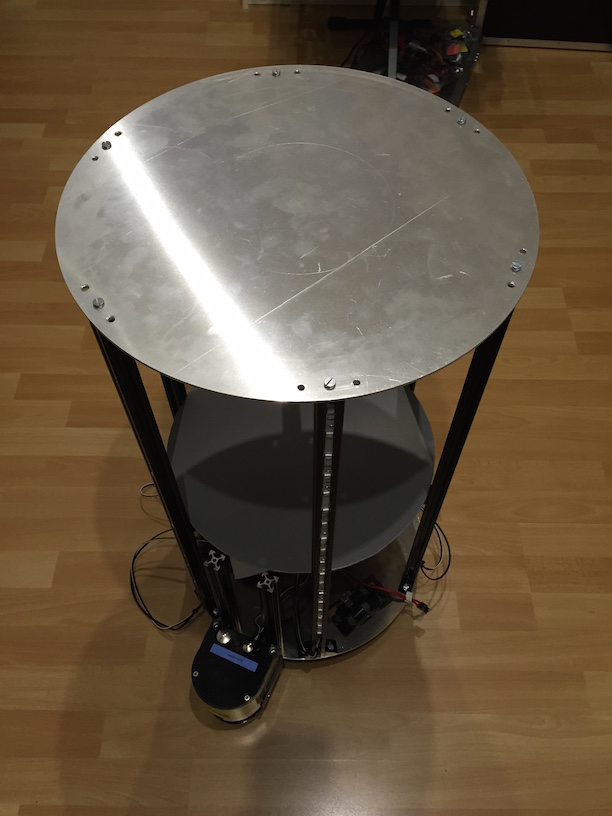
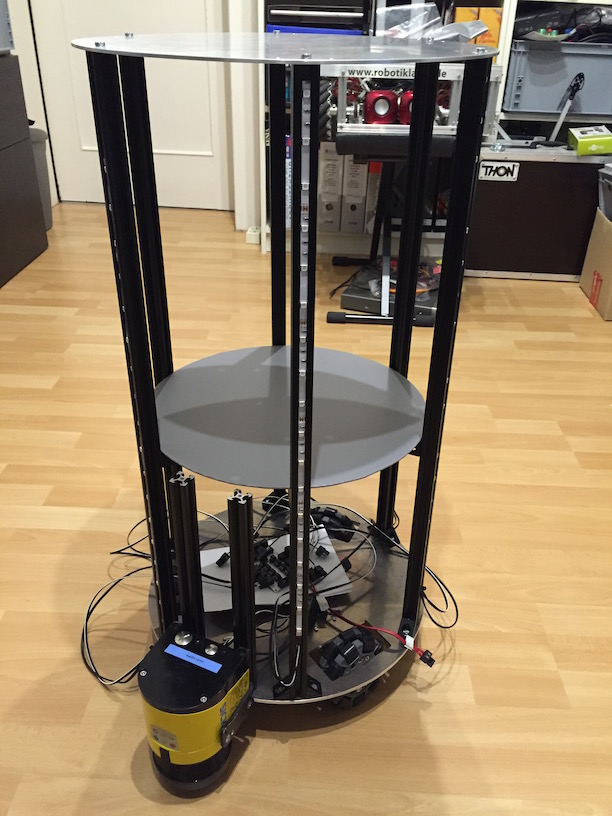
Und hier noch ein paar weitere Impressionen des aktuellen Stands:


Interessantes Projekt. Ich bin auch dabei einen Roboter zu bauen. Meiner wird allerdings mit Raspberry Pi und Arduino arbeiten. Ich werde diesen Blog auf jeden Fall weiter verfolgen.
Vielen Dank! Dir auch viel Erfolg mit deinem Bot.
lach, die überflüssigen löcher kann man garantiert für was anderes verwenden. die löcher sind so schön symetrisch.
gruß stephan
Toller Blog. Wirklich interessante Sachen dabei. Weiter so :)
Kurze Frage:
Wie schnell kann die (Omni-) Plattform sich bewegen? Sind auch sehr dynamische und ruckartige (vorausgesetzt die Haftung der Räder ist groß genug) möglich?
Danke Gil. Leider zurzeit nicht sehr aktiv. :/
Die Plattform ist nicht wirklich schnell, da die Motoren mit Getriebe sind und eine starke Unterstützung haben. 1:150 wenn ich es gerade richtig in Erinnerung habe. Das schließt meiner Meinung nach auch ruckartige schnelle Bewegungen etwas aus.