
Am 3. August 2013 fand zum ersten Mal in Deutschland die Maker Faire in Hannover statt und wir waren dabei. Eine Vorstellung unserer Projekt findet ihr weiter unten.
Und ein paar Fotos – inklusive einer Vorführung im Laser Zentrum Hannover – findet ihr im Menü unter Events. Oder eben genau hier verlinkt.
Eine Aufzeichnung des Livestreams unseres Podcasts Robotiklabor haben wir übrigens auch gesendet! Hört doch mal rein – nur 45 Minuten.
Und hier noch ein Video von uns erstellt:
direcs & friends
Josef
Dottie
Eine kleine Getränkedose, 0,15 L Nenninhalt, läuft als Roboter über Tische. Hier gilt es, in einem sehr kleinen Volumen einen kompletten, autonomen Roboter einzubauen. Von außen sieht es wie eine originale Getränkedose aus.
Technische Daten:
Akku mit 6 Volt, 3 Motoren, fünf Sensoren, verschiedene Programme und Fahrmodi sind mit einer TV-Steuerung aufrufbar.
Weitere Infos im Roboternetz und zwar hier und hier.
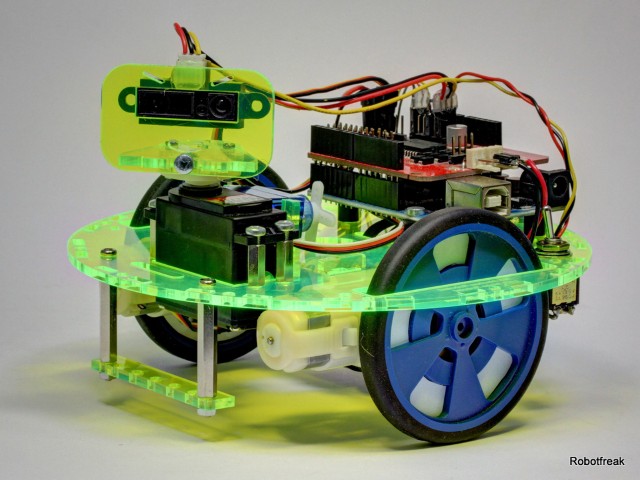
WALL R – Wand Abstands Limit Läufer aus RC-Car
Ein ehemaliges Fernsteuerauto kann autonom fahren und hält dabei einen gewissen Abstand von rechts liegenden Wänden und nach vorne ein. Bei Geschwindigkeiten bis zu Fußgängertempo fährt das Autochen ohne Eingriffe von außen durch die Gegend und weicht dabei allen Hindernissen aus. Dabei wird die Geschwindigkeit den Fahrmanövern angepasst. Auch Lichtzeichen wie die Bremsleuchten funktionieren.
Technische Daten:
2 Motoren, drei Sensoren, verschiedene Programme und Fahrmodi sind mit einer TV-Steuerung aufrufbar.
Weitere Infos im Roboternetz.
Archie – Roboterkopf ohne Unterleib
Ein Roboterkopf zeigt Physiognomie von technischen Formen. Fast alle Kopfbewegungen sind möglich.
Weitere Infos im Roboternetz.
Jörg
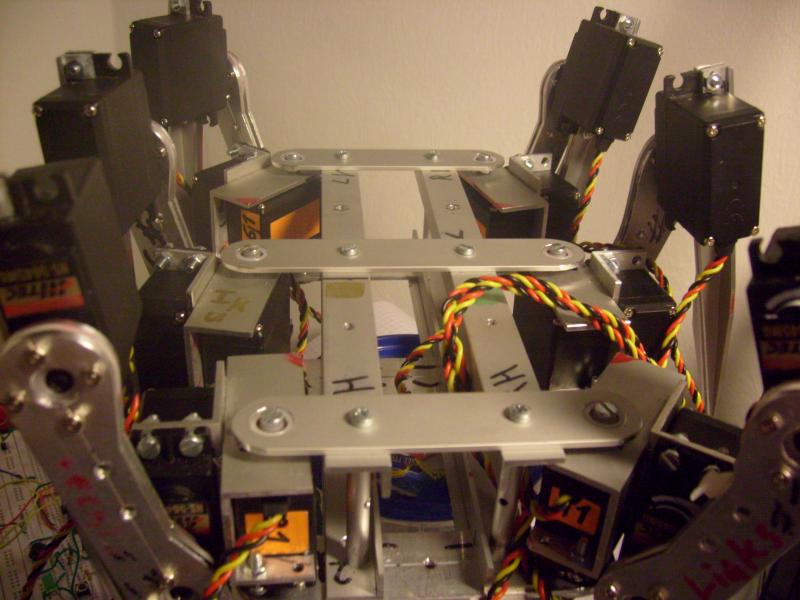
IKU – in Handarbeit gebauter Aluminium Hexapod mit (hoffentlich bis dahin) per IR-Sensorkopf gesteuerten Bewegungen. 3 Hitec Sevos (DOF) pro Bein, mit inverser Kinematik berechnet von ATmega328P-20MHz (Video).
Markus

Der Roboter direcs1 wurde über mehrere Jahre vollständig in Eigenarbeit entwickelt – das betrifft die komplette Hardware und Software.
direcs1 ist in der Lage autonom durch die Gegend zu fahren und Hindernissen selbstständig auszuweichen. Dazu nutzt der einen Laserscanner um Objekte bis 15m Entfernung zu erkennen und daraus zu ermitteln, welche Richtung die beste Ausweichmöglichkeit ergibt.
Des Weiteren ist er über einen Touchscreen steuerbar und zeigt dort auch alle wichtigen Daten an. Er überwacht seine Batterien und verfügt außerdem über eine Sprachausgabe.
Über eine Art „Unterbodenbeleuchtung“ signalisiert er Zustände in verschiedenen Farben (rot, grün, blau).
Er kann zusätzlich Musik über die verbauten Lautsprecher abspielen und dabei rhythmisch mit der LED-Beleuchtung als „Disco-Bot“ blinken und durch die Gegend fahren.
direcs1 ist außerdem in der Lage alle wichtigen Daten per WLAN auf ein Laptop zu übertragen und von dort oder per direkt am Roboter angeschlossenen Joystick manuell gesteuert zu werden.

https://vimeo.com/65855274
Einsatz in vier Wänden
https://vimeo.com/64264166
Einsatz auf der Campus Party in Berlin
Mit im Bild: Neelie Kroes, Vizepräsidentin der Europäischen Kommission
Aktuelles Projekt: Mikrokopter recopter1 und recopter2


Peter
MURCS – Mutli Use Robot Construction System.
Ein Roboter Baukasten System mit Laser geschnittenen Teilen.
Sebastian
Roboter Laser Spirograph, Quadrocopter, und vielleicht ein Segelboot…